Green Machine
Greenwood Community School Corporation
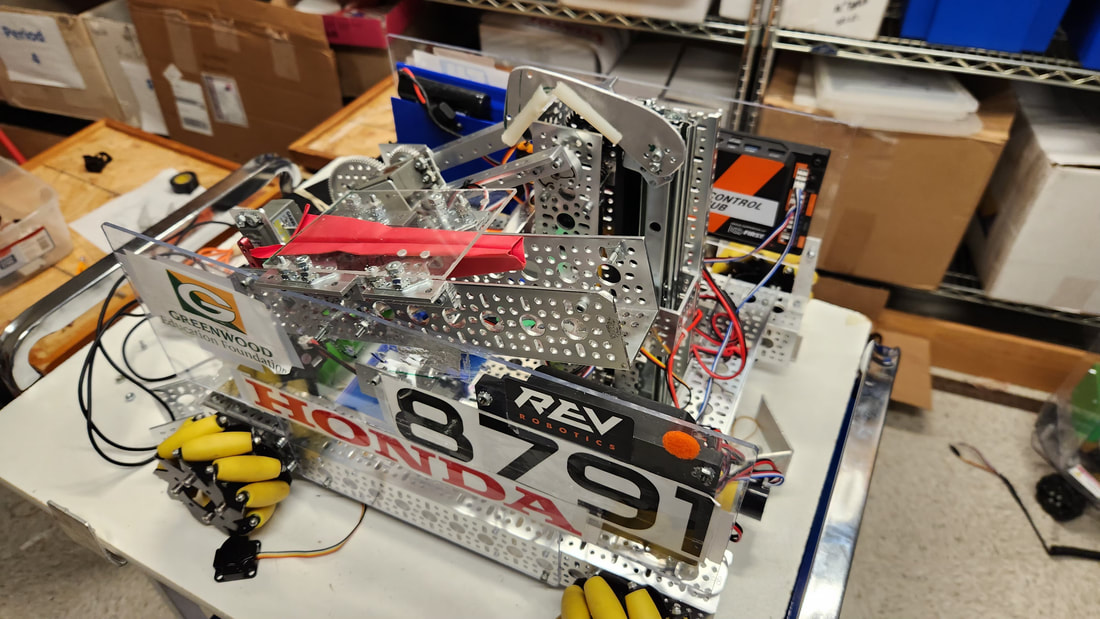
Team 8791
Team 8791
Robot Chassis Design : We used mecanum wheels due to its several advantage. Wheels are mainly used for competition robot due to their ability to introduce fully omnidirectional movement onto a drivetrain. We used Rev product to build chassis. In addition, We used Expansion hub and Control hub to connect our motors and servos.
Pickup Mechanism: We have wheels lined up on our robot that grabs up pixels inside our robot, which is then picked up by flexi glass box. Flexi glass box can hold two pixels at a time and can further drop on to backstage to gain points. Hanging Mechanism: We used GoBILDA 4 stage Viper Slide Kit for hanging mechanism. During endgame we score 20 points if we hang the robot to red or blue truss. Airplane Launcher: We also build box section channel to launch airplane using servo that shoots a plane during endgame. Autonomous program : We used GYRO and IMU to drive our Robot during autonomous and used Husky Lens to detect our Blue and Red Team prop.
1 Comment
|
AuthorWrite something about yourself. No need to be fancy, just an overview. ArchivesCategories |

 RSS Feed
RSS Feed
