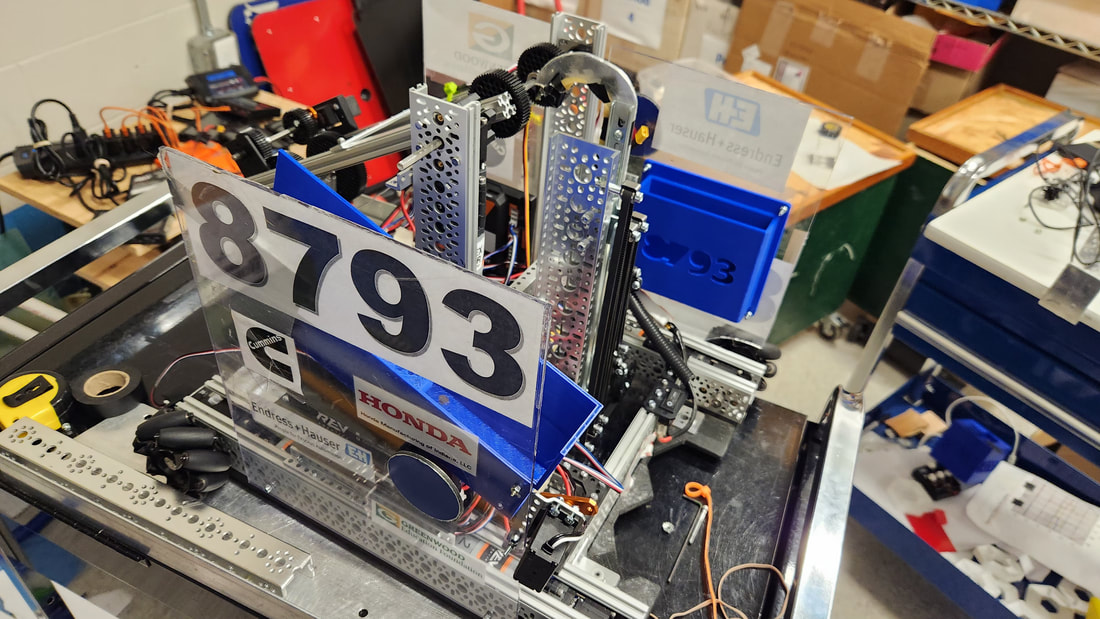
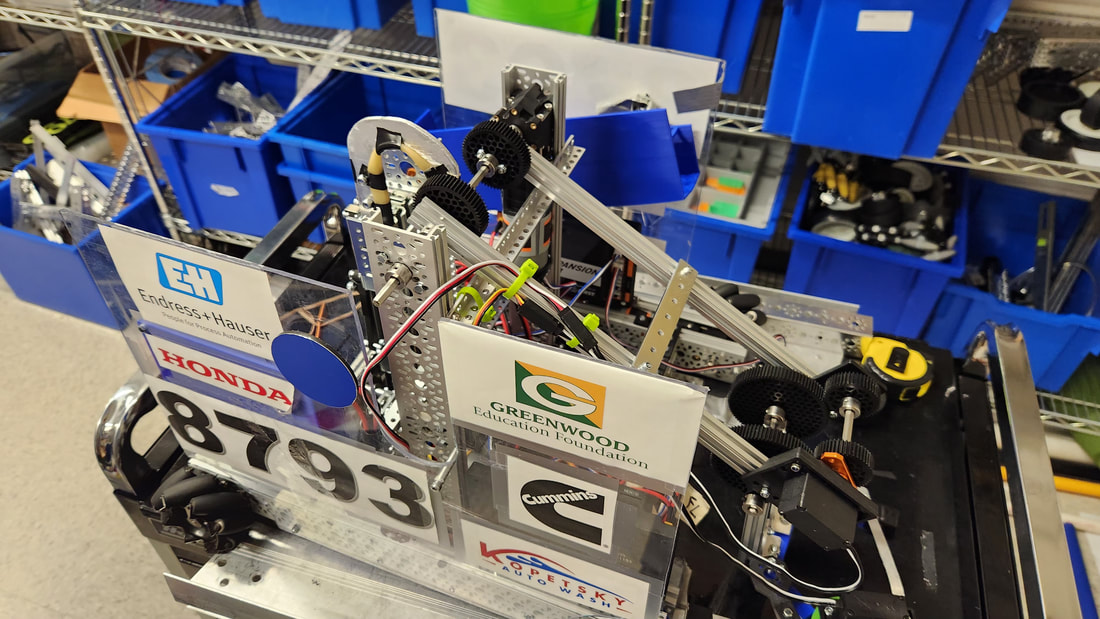
  Drive Train Design: We have a custom REV drive train kit which we put together to make our drive train. We used Mecanum wheel as it has various advantage during competition. It has an ability to introduce fully omnidirectional movement onto drive train. All motors and servos are plugged into REV Expansion and Control Hub.
Claw Design: We have green rubber roller from REV attach to 3D printed claw green roller spins and grab one pixel at a time and drops into backstage to collect points. We have used continuous servo to spin roller so that it can grab pixel effectively. Arm Design: We used two arms, big and small arms. Big arm is operated by REV ultra planetary motor which can move both the side at 180 degrees. Small arm has a servo attach to it which can move at a certain position. Using arms, it is convenient to drop pixel on backstage. Hanging Mechanism: We used 4 stage Viper-Slide kit to hang our robot during endgame to score 20 points. Slide is operated by Go-BILDA battery. Airplane Launcher: We use 3D printed airplane launcher operated by servo that shoots plane in three different position to score 30, 20 or 10 points. Autonomous Program: We used A star algorithm for path finding. We used distance sensor mounted on left and right side of robot to detect team prop. We can detect team prop and drop pixel on spike mark and park. |
AuthorWrite something about yourself. No need to be fancy, just an overview. ArchivesCategories |
 RSS Feed
RSS Feed
